{kind=link}
Obsah stavebnice
Prácuje se ve dvojici. Oba žáci staví od stránky 8 to samé. Až později dojde ke spojení obou dílů.
Po dostavění robota žáci logicky umisťují senzory viz úkol 1.
Alternativní odkaz na SW pro Windows
Pro další OS či distribuce Linuxu
Nejprve připojíme Řídící jednotku (mozek robota) k PC, potom řídící jednotku zapneme. Pokud nejde zapnout řídící jednotka, tak zkontroluj stav baterie - pokud je baterie nabitá, tak zkus znovu zapnout řídící jednotku.
Zvolím ikonu Mozku - připojit - zvolím vždy "VEX Robotics Communications PORT".
Nejprve připojíme Ovladač k PC, potom řídící jednotku zapneme.
Zvolím ikonu Ovladače - připojit - zvolím vždy "VEX Robotics Communications PORT".
Pokud ikona svítí zeleně, tak je firmware plně aktualizován.
{kind=link}
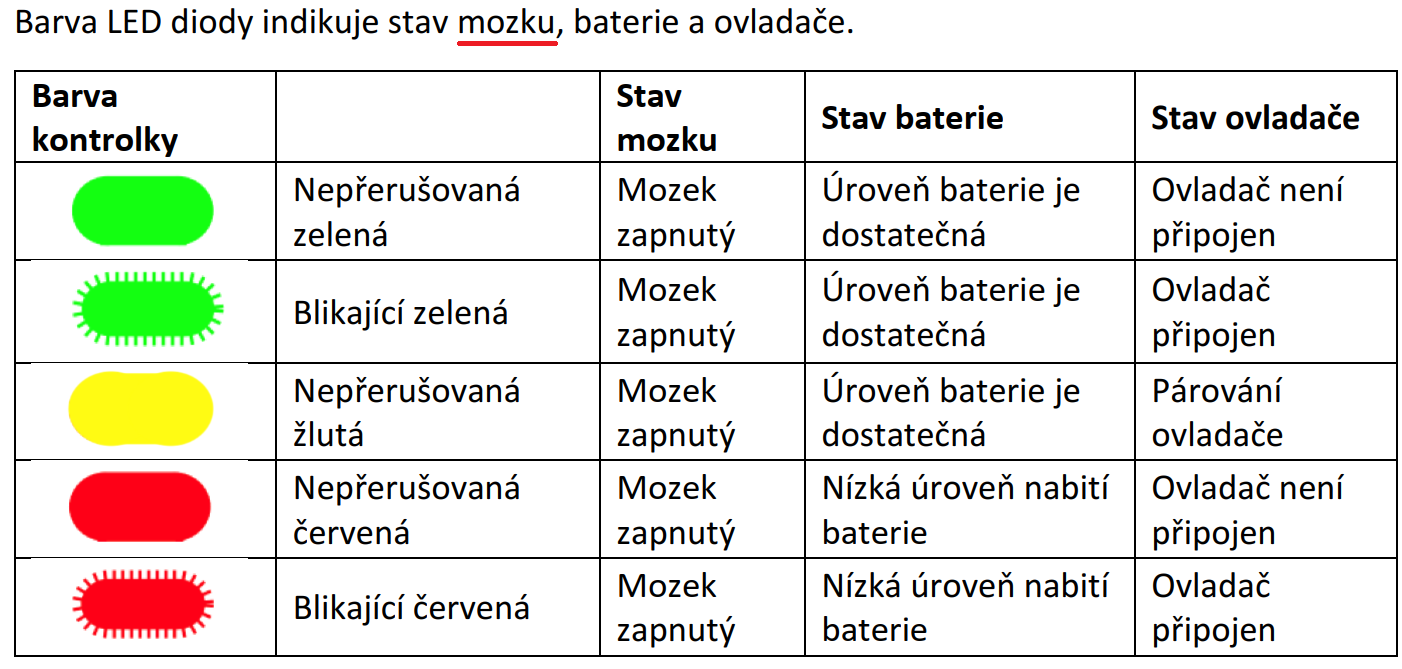
Diody ovladače
{kind=link}
a) Otevři software VEXcode IQ
b) Připojit řídící jednotku k PC pomocí USB kabelu, nyní ověř, žev programu VEXcode IQ svítí Mozek zeleně
c) Zapni pomocí fajfky řídící jednotku. Pokud se objeví hláška k aktualizaci, aktualizuj. Po aktualizaci klikni ok v VEXcode IQ a na řídící jednotce klikni fajfku.
d) Zkontrolujeme, zda jsou motory připojené k portům 1 a 6 (TIP na porty: motor na chapadla: 4, motor zvedáku: 10).
e) Pro Bumper Switch doporučuji porty 7, 8, 11, 12.
f) Zkontrolujeme připojení senzorů.

Touch LED - kapacitní dotykový senzor, umí zobrazit 16 milionů barevných kombinací pomocí interního procesoru s LED diodami (červenými, zelenými, modrými), může blikat.

Distance Senzor - nlaserový senzor k měření vzdálenosti

Optical Senzor - detekuje barvy

Bumper Switch - nárazník